


論文上線截圖
原文鏈接:https://doi.org/10.1093/nsr/nwac164
液滴操控對于基礎研究與實際應用(生化反應、診斷分析等)都尤為重要。盡管采用電場、磁場等外場操控液滴備受矚目且取得較大進展,但這類液滴操控通常需借助大型設備、復雜的電極設計,或需添加電/磁響應性材料,極大影響液滴操控的靈活性與持久性。光作為非常典型的外場之一,雖可通過光化學、光機械、光誘導馬蘭戈尼效應,或光誘導電場等策略,將光轉變為液滴運動的驅動力進而克服上述問題,但仍面臨新的挑戰:一方面,由于光產生的驅動力很大一部分被界面阻力抵消,導致液滴運動速度慢、距離短且靈活性差;另一方面,采用紫外光、光響應性試劑或因光導致的損傷等問題,使其在無污染、生物相容性好、可靠性需求高的生化領域應用面臨挑戰。
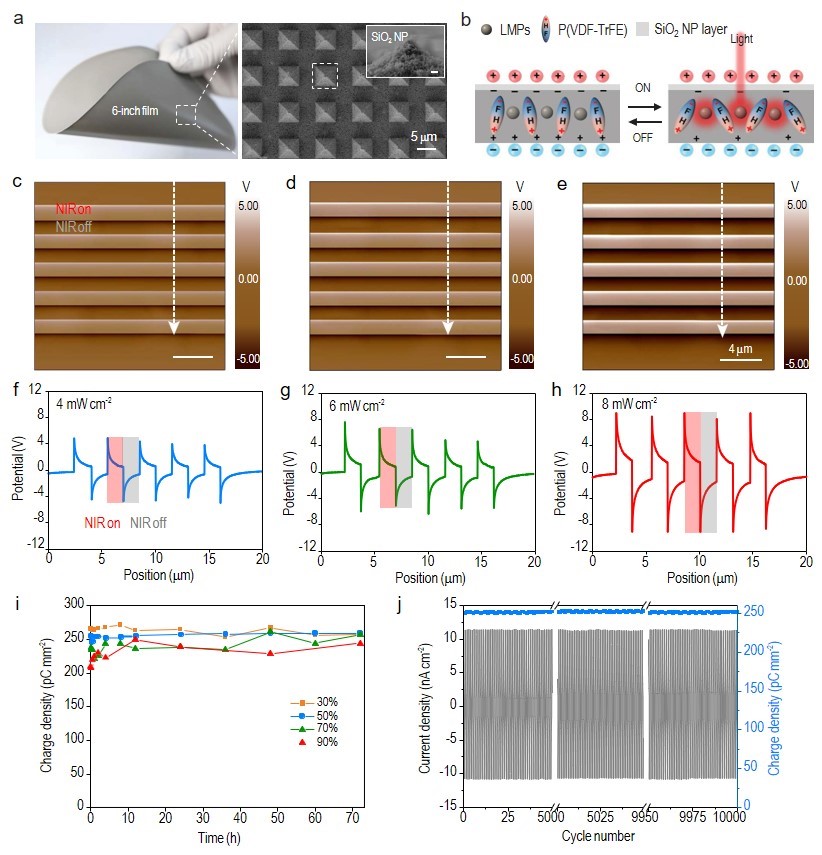
圖1:大面積制備具有優異力學特性的PICS及其光誘導電荷實時再生性能。
基于此,研究團隊采用具有高效光熱與導熱性能的液態金屬顆粒(LMP),與具有獨特鐵電效應的聚偏氟乙烯-三氟乙烯聚合物(P(VDF-TrFE))復合,成功構建了一種基于智能高分子材料的新型超雙疏表面——PICS,通過開爾文探針力顯微鏡(KPFM)揭示了該智能高分子材料表面電荷實時、原位、高效再生能力;研究發現,在較低光強的近紅外光(NIR,100 mW cm-2)照射下,毫秒級內即可產生表面電荷密度高達252 pC mm-2,且PICS表面電荷高效再生能力在較高環境濕度(~90%)與溫度(~70 ℃)等極端環境下幾乎無影響,其電荷高效再生性能在持續10000次光照循環后仍維持穩定。基于PICS獨特的光與電雙重優勢,研究團隊實現了PICS上光控液滴高速(8 μL水滴,平均速度:~ 35.9 mm s-1)、長距離、多模態(向前、向后、旋轉)、集體定向運動,且光控液滴高速運動在較高環境濕度、逾100次循環后仍能維持穩定,并可拓展到如高濃度氯化鈉(1 M)等復雜溶液;研究團隊還采用麥克斯韋應力張量模型分析驗證了光控液滴運動機制;在此基礎上,研究團隊實現了光操控液滴在液滴機器人領域應用:光操控液滴在PICS共形貼合的管內搬運物體、穿梭小隧道、清除粉末、避障運動,及光操控液滴運動同時通過液滴肉眼可見的顏色變化實時感知環境磁場變化;此外,研究團隊還拓展了液滴機器人在細胞輸運、生化檢測等生物領域應用。
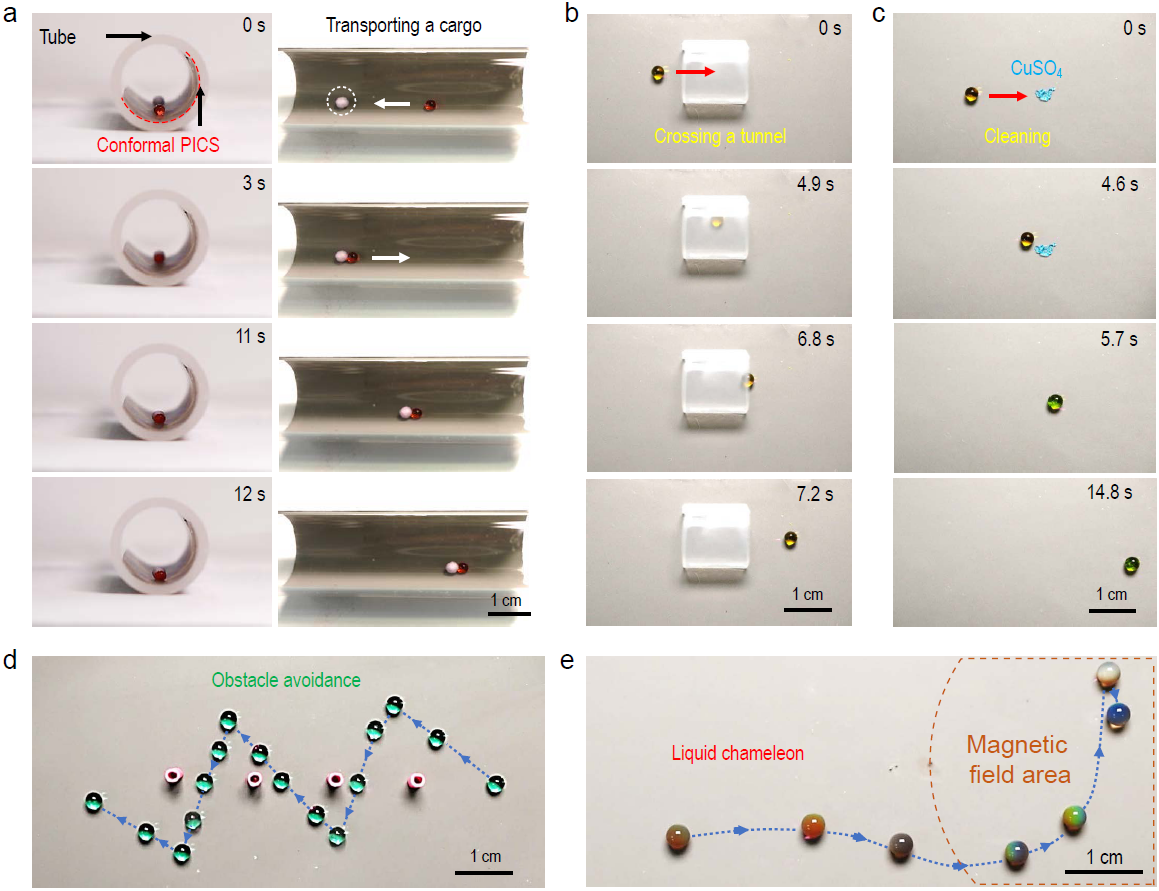
圖2:PICS上采用手持激光筆操控液滴機器人。
PICS融合了光與電的雙重優勢——通過光誘導表面實時、高效與穩定電荷再生,實現液滴靈活、高速、長距離及按需操控,拓展了光控液滴在液滴機器人領域應用;其操控條件溫和且生物相容性好,極大促進了光操控液滴在細胞輸運、生化檢測等領域應用。這類新型的光誘導表面帶電的智能高分子材料及其靈活、高效、可靠的液滴操控能力,有望促進智能界面材料、微流體及其在生物與化學等領域應用的發展。該論文第一作者是中國科學院深圳先進技術研究院博士后王芳、劉美金、博士生劉聰,論文通訊作者為中國科學院深圳先進技術研究院杜學敏研究員;團隊其他成員及合作者均為該研究做出了重要貢獻。蘇州大學何樂教授與香港城市大學王鉆開教授為該工作提供了幫助。該研究得到了國家重點研發計劃、國家自然科學基金、中國科學院青年創新促進會、廣東省區域聯合基金重點項目、深圳市學科布局等科技項目資助。
附件下載: