

近日,中科院深圳先進技術研究院生物醫學與健康工程研究所微創中心李英田副研究員課題組與哈佛大學醫學院Pierre E Dupont教授在Soft Robotics(中科院一區,IF=8.071)合作發表題為“A Soft Robotic Balloon Endoscope for Airway Procedures”的文章。深圳先進院李英田副研究員為第一作者,深圳先進院為第一完成單位。
內窺鏡和球囊導管已廣泛用于氣道和食道等人體自然腔道的診療措施中,它們常組合使用,以內窺鏡識別狹窄阻塞區域,并通過球囊擴張術來緩解病癥。然而,球囊導管需深入腔道進行治療,極易遮擋內窺鏡視野,難以準確定位球囊與病變組織的相對位置。此外,肺中狹窄的部位通常位于轉角處,會進一步增加球囊的視覺定位、球囊擴張監測和擴張后組織檢查的難度。
針對上述挑戰,該工作設計了國際上第一款專為呼吸道檢查和球囊擴張術的軟體爬行內窺鏡機器人。基于球囊結構,這款機器人可以在腔道內自主運動、繞過轉角并執行球囊擴張術;該機器人結構具有尺寸可變性,能較好適應呼吸道中不同的腔道內徑;機器人具有一個中央空腔,不僅可使得機器人在呼吸道中運動時保證空氣暢通,還為未來更多功能的集成提供了可能性;機器人使用的均是生物相容性材料、驅動為手術室中通用的高壓和真空氣體,且加工成本可控(機器人本體不到35人民幣)。該機器人在實驗室環境和動物的體外組織中進行了功能測試,證實了此機器人可消除由于組合使用內窺鏡和球囊導管而引發的視覺遮擋問題,它還提供了檢查轉角處病變組織的能力。
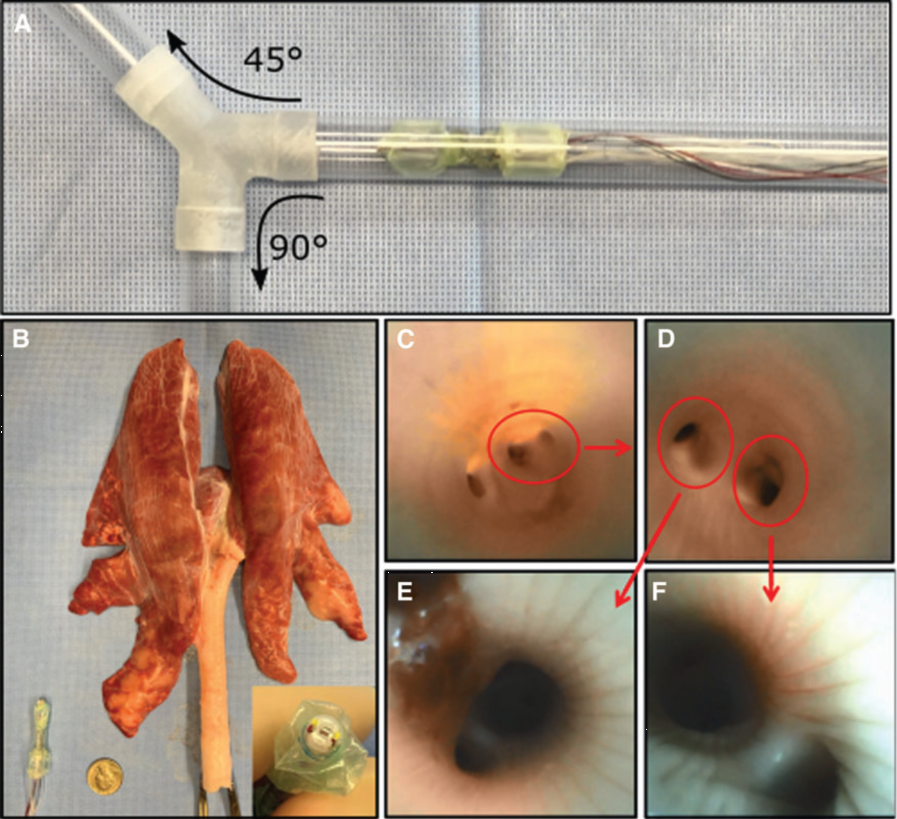
圖1. 機器人導航實驗。(A)三通管接頭轉彎實驗。(B)動物豬活體外組織與機器人原型機。(C)豬氣管內,機器人視角中顯示的三個支氣管位置。(D)下肺葉支氣管位置。(E)從右下葉支氣管內觀察下一分支。(F)從左下葉支氣管內觀察下一分支。
全文鏈接:https://www.liebertpub.com/doi/10.1089/soro.2020.0161
附件下載: