

小型磁性軟機(jī)器人導(dǎo)管能夠在人體復(fù)雜的血管系統(tǒng)中實現(xiàn)遠(yuǎn)程主動轉(zhuǎn)向?qū)Ш剑⒂行p少手術(shù)過程中對醫(yī)生和患者的輻射暴露,因此在微創(chuàng)手術(shù)中具有巨大的應(yīng)用潛力。然而,現(xiàn)有的磁性導(dǎo)管由于缺乏原位生物力學(xué)力感知,在微創(chuàng)手術(shù)中容易導(dǎo)致組織損傷。
11月24日,中國科學(xué)院深圳先進(jìn)技術(shù)研究院徐海峰團(tuán)隊聯(lián)合中北大學(xué)李銳銳副教授、悉尼科技大學(xué)林滾滾助理教授,在小型磁控機(jī)器人導(dǎo)管的原位力感知策略方面取得重要研究進(jìn)展。相關(guān)成果在期刊Biosensors and Bioelectronics上發(fā)表題為“Small-scale magnetic soft robotic catheter for in-situ biomechanical force sensing”的文章。

論文上線截圖
在本研究中,研究團(tuán)隊提出了一種適用于小型磁控機(jī)器人導(dǎo)管的原位力感知策略。通過在導(dǎo)管遠(yuǎn)端同軸集成環(huán)形永磁體和基于光纖的力傳感器,構(gòu)建了驅(qū)動與感知一體化的磁性軟導(dǎo)管(直徑為2.3mm),實現(xiàn)了遠(yuǎn)程主動轉(zhuǎn)向?qū)Ш脚c高靈敏度生物接觸力學(xué)感知。
在管腔穿行過程中,磁性軟導(dǎo)管通過力學(xué)傳感器檢測與生物組織接觸時力的增加來識別障礙物(靈敏度達(dá)到0.38nm/mN)。主動轉(zhuǎn)向使導(dǎo)管能夠避開障礙物并繼續(xù)順利穿過管腔,從而在復(fù)雜的管腔系統(tǒng)中安全深入病灶進(jìn)行精準(zhǔn)控制,實現(xiàn)了主動操控與精確力測量的結(jié)合。力學(xué)反饋顯著提高了微創(chuàng)手術(shù)的安全性和效率,特別適用于肺結(jié)節(jié)經(jīng)支氣管微波消融和心房纖顫射頻消融等操作。
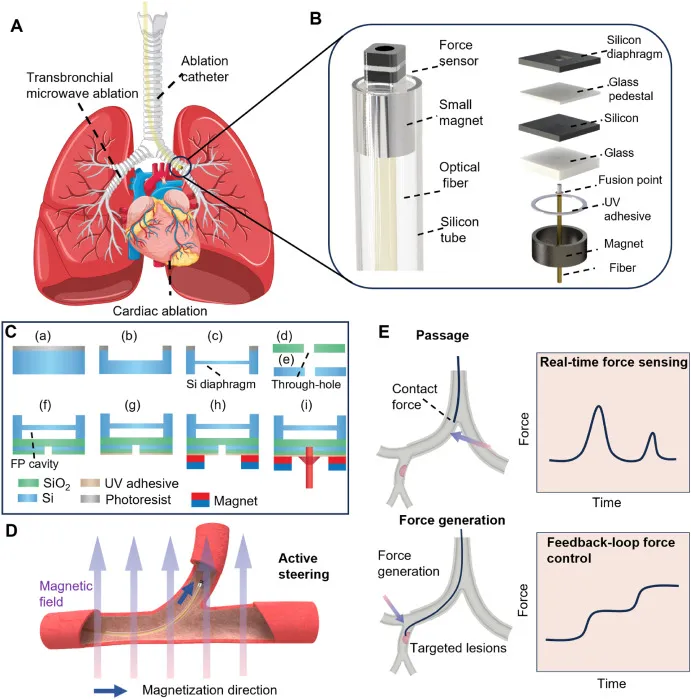
驅(qū)-感一體化的磁控機(jī)器人導(dǎo)管在微創(chuàng)手術(shù)中的應(yīng)用。
進(jìn)一步地,研究團(tuán)隊驗證了該小型磁控機(jī)器人導(dǎo)管在特定微創(chuàng)手術(shù)應(yīng)用場景中的適用性。報告指出,0.1~0.4N范圍內(nèi)的接觸力可顯著改善心臟消融手術(shù)的效果。當(dāng)遠(yuǎn)端磁性導(dǎo)管與組織接觸時,法向接觸力的可控性對有效進(jìn)行消融具有顯著影響。
在驗證實驗中,研究團(tuán)隊通過控制遠(yuǎn)端磁性導(dǎo)管深入并引導(dǎo)至離體豬心臟的目標(biāo)病灶,通過外部磁場發(fā)生器增加磁場強(qiáng)度,在導(dǎo)管與目標(biāo)病灶組織接觸點迅速產(chǎn)生0.2N的初始接觸力。
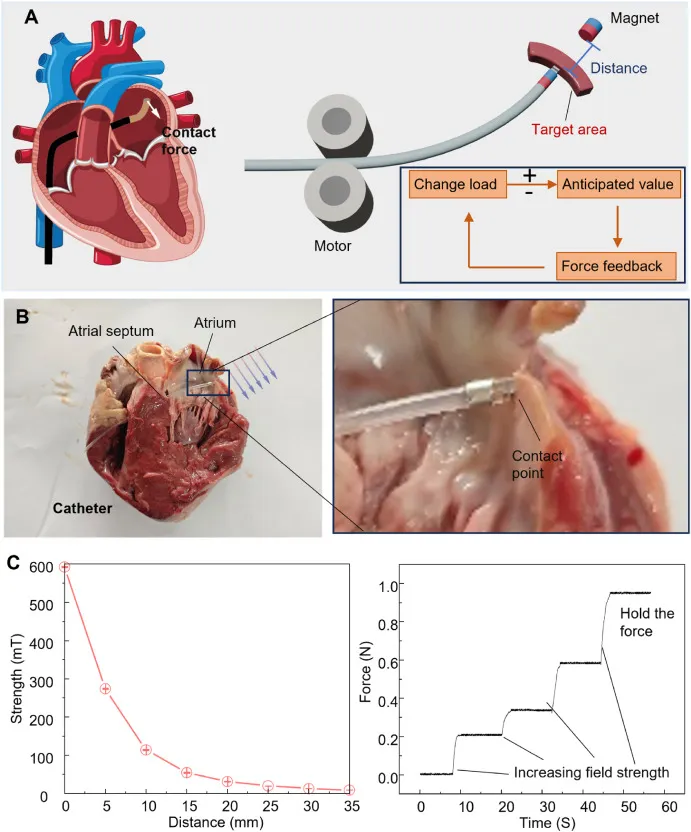
利用反饋回路力控制磁性導(dǎo)管在離體豬心臟中產(chǎn)生可控接觸力。
通過固定外部磁體,保持外部磁體與環(huán)形磁體之間的距離,從而確保接觸力保持穩(wěn)定。如果力值偏離目標(biāo)值,磁場強(qiáng)度會動態(tài)調(diào)整,以恢復(fù)并保持所需的力水平。通過進(jìn)一步提高場強(qiáng),接觸力可調(diào)整至0.2~1N。這種精確的接觸力控制突出了力感應(yīng)機(jī)制在微創(chuàng)手術(shù)中的可行性。
李銳銳副教授為論文第一作者,深圳先進(jìn)院徐海峰副研究員、劉源副研究員,以及林滾滾助理教授為論文通訊作者。本項目受到了研究工作獲得國家自然科學(xué)基金項目、深圳市基礎(chǔ)研究計劃等項目支持。
附件下載: