

近日,中科院深圳先進技術研究院生物醫學與健康工程研究所微創中心李英田副研究員課題組,與北京大學、北京航空航天大學、新加坡國立大學和瑞士洛桑聯邦理工學院,在Cell子刊Cell Reports Physical Science上合作發表了題為“Ultra-tunable bistable structures for universal robotic applications”的文章。深圳先進院蔣永康博士后為第一作者,李英田副研究員為唯一通訊作者,深圳先進院為本文的第一單位與通訊單位。
文章上線截圖
雙穩態結構具有快速響應和力放大能力。利用穩態特性和不穩定性來快速釋放雙穩態結構中存儲的能量可以提升機器人的諸多性能,例如高速運動、自適應傳感和快速抓取等。然而,目前關于雙穩態結構的研究主要集中在它們的穩定狀態,卻缺少對于他們中間狀態的研究。
為此,研究團隊提出了一種能量壁壘可編程和觸發力跨數量級可變的超可調雙穩態結構,并可以根據不同應用場景而進行幾何構型、尺寸、材料和驅動方法的定制化設計。該雙穩態結構通過將片狀材料折疊成為特定的折痕圖案,具有一個穩定狀態、一個亞穩定狀態和數量諸多的中間狀態。當雙穩態結構從亞穩態轉變為穩態時,存在一個臨界點,此時存儲的應變能達到最大值,同時結構會發生失穩,快速躍變至穩態。而這項工作,主要研究的是在雙穩態結構達到其臨界點之前的能量壁壘可編程的諸多中間狀態。
為了證明所提出結構的可調性,研究人員進行了一系列實驗,實現了單體雙穩態結構的觸發力可調整為最大值的 0.1%,同時,使用不同設計參數制成的機械抓手能夾持的重量差別可達107倍。此外,為了驗證該結構在機器人應用上的潛力,研究團隊開發了不同的原型樣機,包括機械捕蠅草、機器抓手,彈跳和游泳機器人、溫敏開關和分揀系統等。通過對于原型樣機的測試,團隊發現:具有超靈敏“花蕊”的機器人捕蠅器可以在 10 ms內完成蜜蜂的捕捉、雙穩態抓手可以牢牢抓住到高速射來的乒乓球(10m/s)、彈跳機器人的跳躍高度可達機器人身高的24倍以上,等等。
該工作所展示的雙穩態結構具有優越的可調特性與廣泛的應用潛力,可以拓展雙穩態結構設計的前沿,并為機器人、生物醫學工程、建筑和動態藝術等領域的未來設計開辟新的道路。
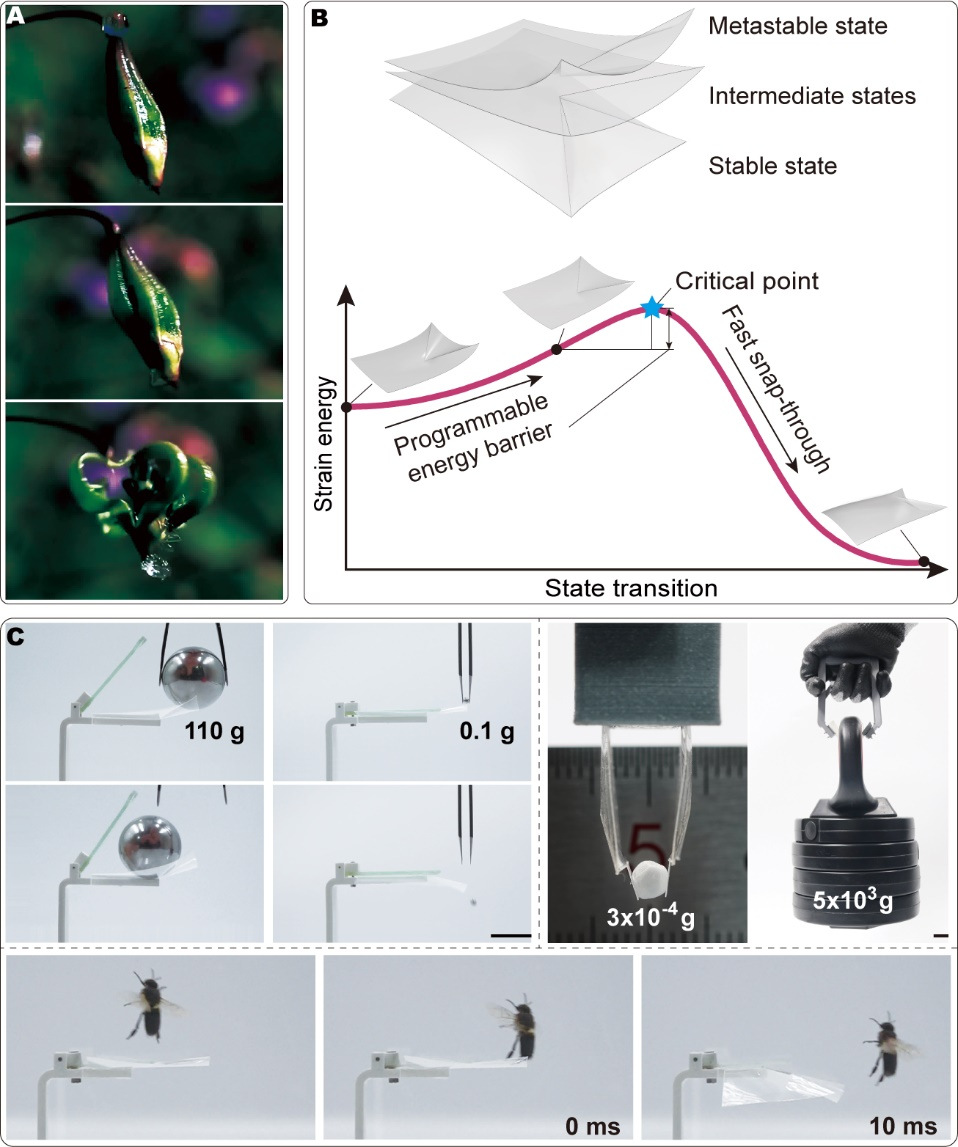
超可調雙穩態結構的示意圖
附件下載: